
R/C Helicopter Hobby in Singapore
|
| Home | Why R/C Helicopter? | How to start? | Setting up | Articles | Flying Lessons | Links | Message Board | For Sale |
Well, stability of nitro heli is one of the most important considerations that a r/c heli flier is concerned. These are what I understand about stability from my limited experience:
1)rotor head design
It should be as slope free as possible. All the linkages must be a good fit.
The paddles shouldn't move on it's own because they control the cyclic movement.
The rotorhead mainly determines the flight performance of the heli. Some rotorheads
are designed to give quick cyclic response in 3D flying. Some rotorheads are
designed to give rock solid F3C type of hovering but don't really fair well
in 3D flying. And there are some that allow the user to choose stability or
quick response. The key issue is how swash plate movement translate to cyclics
movement. That is why some serious flier has metal swash plate. The design of
the paddles is very important. A light paddle gives quicker cyclic response.
A heavier paddle gives stability in hover. For example, the paddle on my Sceadu
has a brass and lead weight in it. If I want 100% stability, I will have to
put the two weights in. If I decide to sacrifice some stability for quicker
cyclic response, I can take out the brass weight. If I really want a wild flight,
I can take out all the weight. The type of main blades is plays a part too.
Wooden blades are light and hence they give incredible climbout speed. However
carbon/FRP blades are more rigid and they give better stability. Please get
some reputable brand of blades, don't give cheapo no brand blades. I'm using
TT woodies on my Sceadu. Also check the blade tracking. Blades going out of
track cause vibration.
Hirobo Sceadu rotor head, note the metal radius block. This is one of the most slope free plastic rotor head available. The newer Sceadu Evo head promises to be better at both 3D and F3C flying.
2)design of heli
frame
The weight of the heli is an important issue. It partly determines how well
the heli can sit in a hover. A heavier heli is less likely to be affected by
wind. On the opposite, a light heli is sensitive to wind. That is why all F3C
competitors fly 90 size heli. However, 3D pilots like a light and strong airframe.
Hence composite carbon plates are popular in many 3D helicopters. Besides weight,
the layout and structure of the helicopter frame are important too. A well designed
helicopter frame should allow the movement of the cyclics servos to translate
directly into the corresponding movement in the swashplate. So far, I find that
if the movement of the servo horn is perpendicular to the linkage rod leading
to the swashplate, the feel of the cyclic movement is better. Besides the placement
of the cyclics servos, the helicopter frame should be designed in such a way
that the engine can fit in easily and there should be a high degrees of self
alignment. If the engine mount flexes or the alignment is not accurate, nasty
vibrations will occur and this will result in a great decrease in stability.
Overall, the CG of the helicopter frame should be as close as possible to the
main rotor shaft. If the helicopter is nose heavy, the helicopter will have
the tendency to pitch forward in flight. But with proper trimmings on the swashplate,
the issue of CG may not be that important. All the screws must be tight. It
is important to check those screws that all along the drive train(where all
the turning parts are). You should tighten until you start to feel resistance
to your turning action. Do not over tighten until the screw thread is damaged.
As for the servos, you should tighten until the rubber dampers start to move.
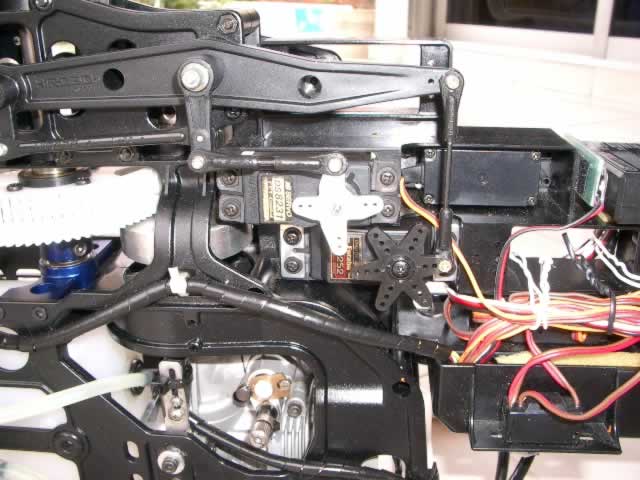

Hirobo Sceadu frame, right side has the ailerion and collective pitch servos, left side has the elevator and throttle servos. Note that the servo horn is perpendicular to the linkage rod at neutral position. Note the white delrin DTDS main gear, this is for aerobatic autorotation. Tie the servos wires up neatly, for example, I use wire tie to wrap the servos wires up. The black spiral wrap is used to protect the gyro wire and and GV 1 sensor wire.
3)engine performance
The engine is the powerplant of the helicopter and it's consistency is very important. An inconsistent engine will give erratic rpm output and the helicopter may wobble up and down. You can refer to "Article 1: How to tune an engine". With the introduction of the engine rpm governor, the problem of getting a good throttle curve is much simplified. I am using the Futaba GV 1 engine rpm governor. Basically, a governor senses the rpm of the engine via a sensor measuring the rotation rate of the cooling fan. For example, if you set an engine rpm of 1600 for normal mode, the governor will try to maintain this setting. If you increase the blade pitch, the engine will need more power to maintain the set rpm. So the governor sense a drop in rpm initially and then immediately send a signal to the throttle servo to increase the throttle so that the engine can output more power. It has been reported that the Futaba GV 1 is so good that one can hardly notice any delay in throttle response when you change the blade pitch. Many F3C and 3D pilots make use of the engine rpm governor.

Futaba GV 1engine rpm governor is placed at the top of the servo tray so that I can read the rpm through the canopy windscreen.
4)tail/gyro
Belt drive tail is easier to maintain. Check the belt tension once a while,
and especially if you are flying in a grass field. The tail blades can hit grass,
causing the belt to loosen. Besides belt drive, there is also the turb drive
or shaft drive. instead of a belt running from the main gear to the tail gears,
we have a shaft. The question of using a belt drive or a tube drive is very
subjective. IMHO, if you are still learning, getting a belt drive is better
because it is easier to maintain and the teeth doesn't strip easily if you have
a hard landing. But if you are already an accomplished pilot, a tube drive might
be good, especially when you are doing autorotation. Some pilots also claimed
the the tail response is better when using a tube drive. But I have a belt drive
on my Sceadu and so far I found no issue with it. The role of the tail gyro
is very important. This electronic device senses the yaw of the helicopter and
corrects it accordingly. Most modern gyro has the heading hold function. This
technology has made flying r/c helicopter much easier. The gyro gain should
be as high as possible. Generally, you can start with 75% gyro gain in HH mode.
Fly the heli, if the tail wag left and right slowly, increase the gain until
the tail wagging stops. Then decrease the gain by about 5%. The settings differ
for each brand. Unfortunately not all HH gyro holds the tail. Some gyro can
have drift. Drift is the slow movement of tail without any user rudder inputs.


The
Futaba GY401 gyro is placed above the yaw axis of the helicopter. I ensure that
the gyro is 10cm away from the engine, so that any vibrations will not translate
to gyro. Allow some slack in the servo wires so that in case the tail boom is
teared off during a nasty crash, the gyro will not break apart. Note that the
tail servo horn is perpendiculat to the linkage rod at neutral. The tail blade
pitch should be about 6 to 8 degrees at neutral. I
use the bigger Freya tail blades to provide better tail holding during backwards
flight.